Marlon Schumacher wird zusammen mit Esther Fee Feichtner als Co-Chairs für Music and Installation Submission dienen für das IEEE
5th International Sympoisum on the Internet of Sounds.
das vom 30. September bis 2. Oktober 2024 in den International Audio Laboratories Erlangen stattfindet. Folgen Sie diesem Link zur offiziellen IEEE Website:
„Das Internet der Klänge ist ein aufstrebendes Forschungsgebiet an der Schnittstelle zwischen den Bereichen Sound und Music Computing und dem Internet der Dinge. […] Ziel ist es, Akademiker und Industrie zusammenzubringen, um die Entwicklung von Internet-of-Sounds-Technologien mit Hilfe neuartiger Werkzeuge und Prozesse zu untersuchen und voranzutreiben. Die Veranstaltung besteht aus Vorträgen, Keynotes, Panels, Posterpräsentationen, Demonstrationen, Tutorials, Musikaufführungen und Installationen.“
Abstract: Beschreibung des Inertial Motion Tracking Systems Bitalino R-IoT und dessen Software
Verantwortliche: Prof. Dr. Marlon Schumacher, Eveline Vervliet
Introduction
In this blog, I will explain how we can use machine learning techniques to recognize specific conductor gestures sensed via the the BITalino R-IoT platform in Max. The goal of this article is to enable you to create an interactive electronic composition for a conductor in Max.
This project is based on research by Tommi Ilmonen and Tapio Takala. Their article ‚Conductor Following with Artificial Neural Networks‘ can be downloaded here. This article can be an important lead in further development of this project.
Demonstration Patches
In the following demonstration patches, I have build further on the example patches from the previous blog post, which are based on Ircam’s examples. To detect conductor’s gestures, we need to use two sensors, one for each hand. You then have the choice to train the gestures with both hands combined or to train a model for each hand separately.
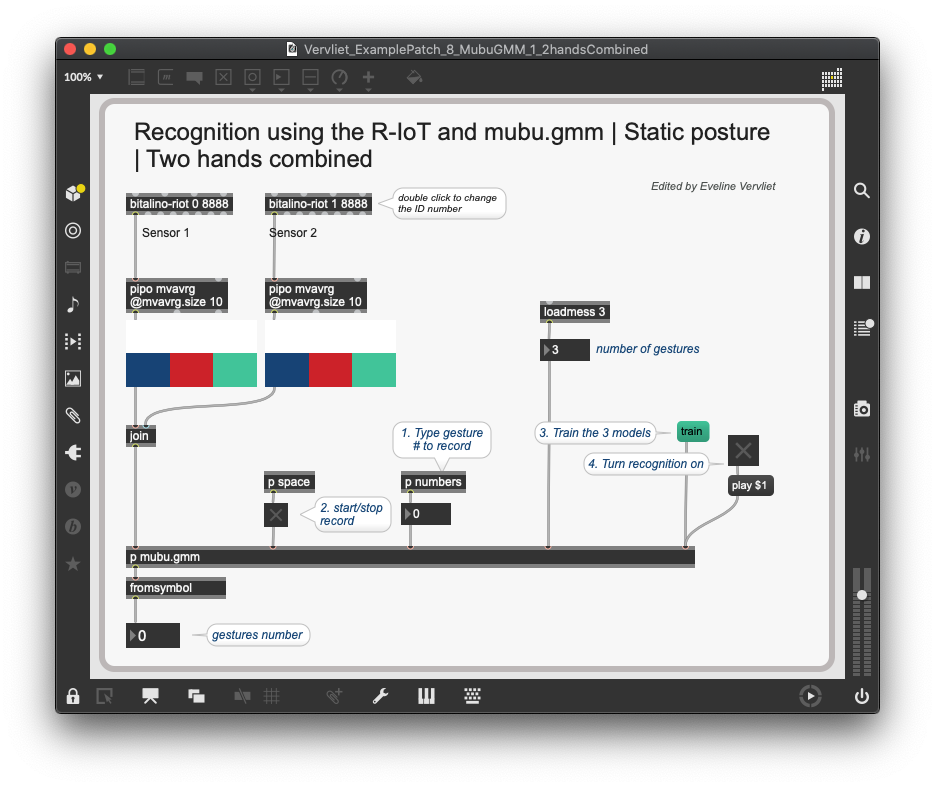
Detect static gestures with 2 hands combined
When training both hands combined, there are only a few changes we need to make to the patches for one hand.
First of all, we need a second [bitalino-riot] object. You can double click on the object to change the ID. Most likely, you’ll have chosen sensor 1 with ID 0 and sensor 2 with ID 1. The data from both sensors are joined in one list.
In the [p mubu.gmm] subpatch, you will have to change the @matrixcols parameter of the [mubu.record] object depending on the amount of values in the list. In the example, two accelerometer data lists with each 3 values were joined, thus we need 6 columns.
The rest of the process is exactly the same as in previous patches: we need to record two or more different static postures, train the model, and then click play to start the gesture detection.
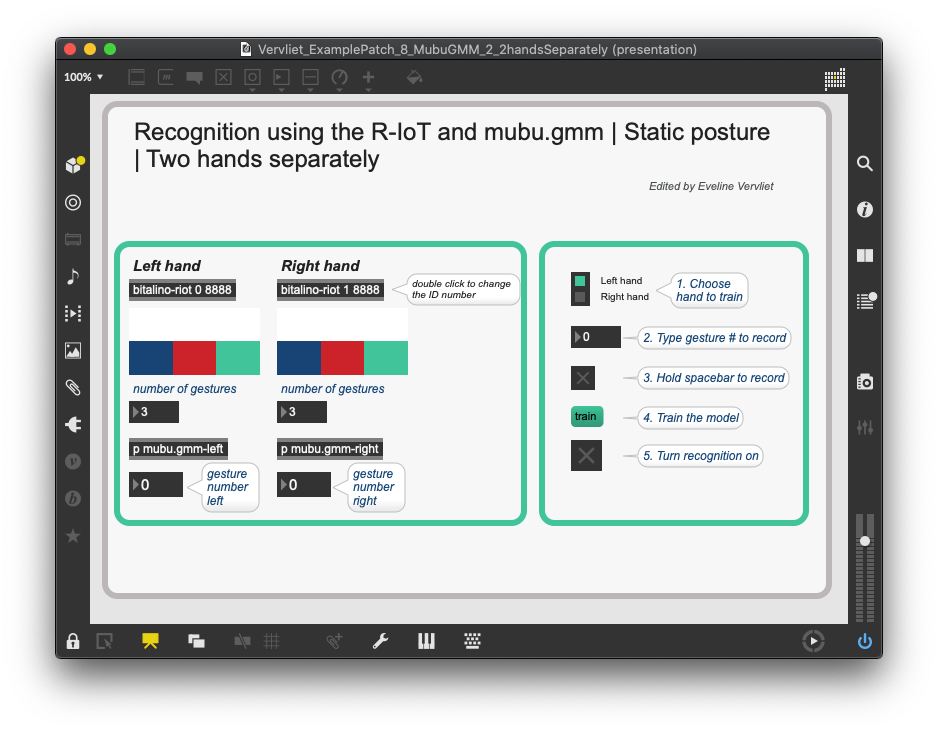
When training both hands separately, the training process becomes a bit more complex, although most steps remain the same. Now, there is a unique model for each hand, which has to be trained separately. You can see the models in the [p mubu.gmm-left] and [p mubu.gmm-right] subpatches. There is a switch object which routes the training data to the correct model.
In the above example, I personally found the training with both hands separate to be most efficient: even though the training process took slightly longer, the programming after that was much easier. Depending on your situation, you will have to decide which patch makes most sense to use. Experimentation can be a useful tool in determining this.
Detect dynamic gestures with 2 hands
The detection with both hands of dynamic gestures follow the same principles as the above examples. You can download the two Max patches here:
The mentioned tools can be used to detect ancillary gestures in musicians in real-time, which in turn could have an impact on a musical composition or improvisation. Ancillary gestures are „musician’s performance movements which are not directly related to the production or sustain of the sound“ (Lähdeoja et al.) but are believed to have an impact both in the sound production as well as in the perceived performative aspects. Wanderley also refers to this as ‘non-obvious performer gestures’.
In a following article, Marlon Schumacher worked with Wanderley on a framework for integrating gestures in computer-aided composition. The result is the Open Music library OM-Geste. This article is a helpful example of how the data can be used artistically.
Links to articles:
Marcelo M. Wanderley – Non-obvious Performer Gestures in Instrumental Musicdownload
O. Lähdeoja, M. M. Wanderley, J. Malloch – Instrument Augmentation using Ancillary Gestures for Subtle Sonic Effectsdownload
M. Schumacher, M. Wanderley – Integrating gesture data in computer-aided composition: A framework for representation, processing and mappingdownload
Detecting gestures in musicians has been a much-researched topic in the last decades. This folder holds several other articles on this topic that could interest.
Abstract: Beschreibung des Inertial Motion Tracking Systems BITalino R-IoT und dessen Software
Verantwortliche: Prof. Dr. Marlon Schumacher, Eveline Vervliet
Introduction to the BITalino R-IoT sensor
The R-IoT module (IoT stands for Internet of Things) from BITalino includes several sensors to calculate the position and orientation of the board in space. It can be used for an array of artistic applications, most notably for gesture capturing in the performative arts. The sensor’s data is sent over WiFi and can be captured with the OSC protocol.
The R-IoT sensor outputs the following data:
Accelerometer data (3-axis)
Gyroscope data (3-axis)
Magnetometer data (3-axis)
Temperature of the sensor
Quaternions (4-axis)
Euler angles (3-axis)
Switch button (0/1)
Battery voltage
Sampling period
The accelerometer measures the sensor’s acceleration on the x, y and z axis. The gyroscope measures the sensor’s deviation from its ’neutral‘ position. The magnetometer measures the sensor’s relative orientation to the earth’s magnetic field. Euler angles and quaternions measure the rotation of the sensor.
The sensor has been explored and used by the {Sound Music Movement} department of Ircam. They have distributed several example patches to receive and use data from the R-IoT sensor in Max. The example patches mentioned in this article are based on these.
The sensor can be used with all programs that can receive OSC data, like Max and Open Music.
Max patches by Ircam and other software software/ ├motion-analysis-max-master/ │├max-bitalino-riot/ ││⎿bitalino-riot-analysis-example.maxpat │├max-motion-features/ ││├freefall.maxpat ││├intensity.maxpat ││├kick.maxpat ││├shake.maxpat ││├spin.maxpat ││⎿still.maxpat │ ⎿README.md
Demonstration Videos
In the following demonstration videos and example patches, we use the Mubu library in Max from Ircam to record gestures with the sensor, visualise the data and train a machine learning algorithm to detect distinct postures. The ‚Mubu for Max‘ library must be downloaded in the max package manager.
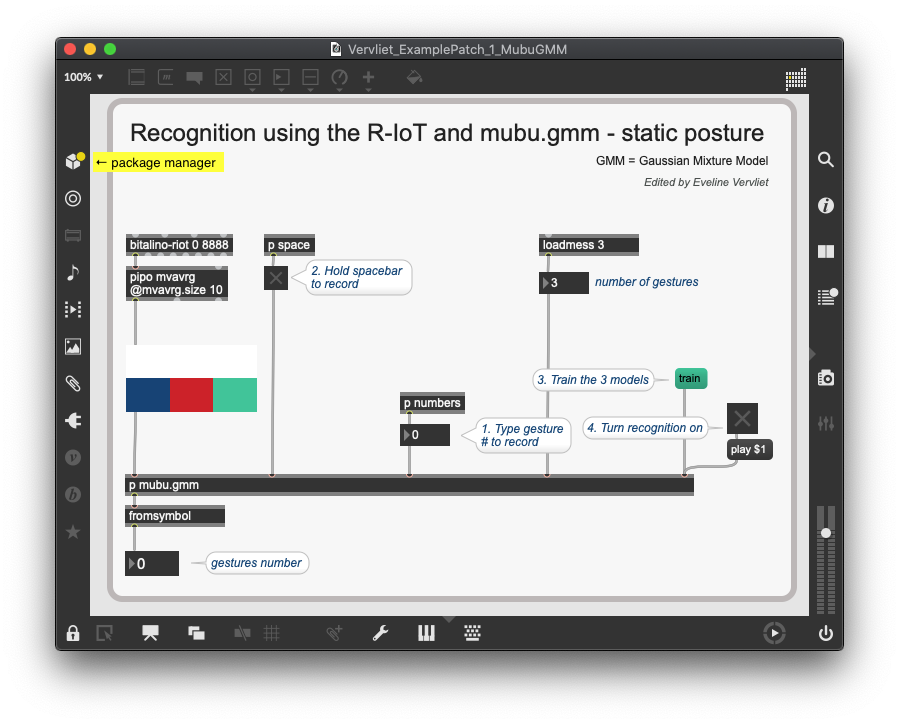
Detect static gestures with mubu.gmm
First, we use the GMM (Gaussian mixture model) with the [mubu.gmm] object. This model is used to detect static gestures. We use the accelerometer data to record three different hand postures.
Detect dynamic gestures with Mubu Gesture Follower
The Gesture Follower (GF) is a separate tool from the Mubu library that can be used in gesture recognition applications. In the following video, the same movements are trained as in the Mubu.hhmm demonstration so we can easily compare both methods.
Gesture detection and vocalization with Mubu in Max for the Bitalino R-IoT
The [mubu.xmm] object uses hierarchical multimodel hidden Markov models for gesture recognition. In the following demonstration video, gestures and audio is recorded simultaneously. After training, a gesture will trigger its accompanying audio recording. The sound is played back via granular or concatenative synthesis.
Abstract: Beschreibung des elektromagnetischen Motion Tracking Systems G4 des Herstellers Polhemus und dessen Software
Verantwortliche: Prof. Dr. Marlon Schumacher, Daniel Fütterer
Das Polhemus G4 System erlaubt das Tracking von Positions- und Orientierungsdaten über magnetisch arbeitende Sensoren. Sender werden im Raum platziert und eingemessen/kalibriert, die Sensoren am zu messenden Objekt befestigt und an kabellose und tragbare Hubs angeschlossen. Diese übertragen die Daten an den PC, der wiederum diese Daten auswerten oder (wie in unserem Anwendungsfall) ins Netzwerk streamt.
Die Software des Herstellers läuft auf Windows und Linux, ist via kodiertem UDP-Export kompatibel mit der Spiele-Engine Unity und besteht jeweils aus mehreren Komponenten für Registrierung, Kalibrierung, Monitoring und Übertragung (z.B. mit Named Pipe oder UDP). Darüberhinaus sind große Teile der Software Open Source, was die Entwicklung individueller Tools ermöglicht.
Unter Linux gibt es eine Suite aus mehreren Programmen:
g4devcfg: Proprietäres Tool zur Konfiguration der Polhemus-Hardware (Dongle und Hub)
g4track_lib: Bibliotheken zur Verwendung mit den anderen Programmen
createcfgfile: Programm zur Erstellung der Config-Files (Aufstellung der Hardware)
g4display: Grafische Anzeige der Sensor-Position und -Orientierung
g4term: Textuelle Ausgabe der Sensor-Daten
g4export (Entwicklung von Janis Streib): Kommandozeilenprogramm zur Übertragung der Sensordaten via OSC
Angewendet wird die Software in Kombination mit Programmen wie Max/MSP oder PureData, die in der Lage sind, den OSC-Stream der Sensordaten auszulesen und zu verarbeiten.
Eine Beispielanwendung wird im Projekt des Studenten Lukas Körfer realisiert: Speaking Objects.
In diesem Projekt entstand im Rahmen der Lehrveranstaltung „Studienprojekte Musikprogrammierung“ eine audio-only Augmented Reality Klanginstallation an der Hochschule für Musik Karlsruhe. Wichtig für den nachfolgenden Text ist die terminologische Abgrenzung zur Virtual Reality (kurz: VR), bei welcher der Benutzer komplett in die virtuelle Welt eintaucht. Bei der Augmented Reality (kurz: AR) handelt es sich um die Erweiterung der Realität durch das technische Hinzufügen von Information.
Motivation
Zum einen soll diese Klanginstallation einem gewissen künstlerischen Anspruch gerecht werden, zum anderen war auch mein persönliches Ziel dabei, den Teilnehmern das AR und besonders das auditive AR näher zu bringen und für diese neu Technik zu begeistern. Unter Augmented Reality wird leider sehr oft nur die visuelle Darstellung von Informationen verstanden, wie sie zum Beispiel bei Navigationssystemen oder Smartphone-Applikationen vorkommen. Allerdings ist es meiner Meinung nach wichtig die Menschen auch immer mehr für die auditive Erweiterung der Realität zu sensibilisieren. Ich bin der Überzeugung, dass diese Technik auch ein enormes Potential hat und bei der Aufmerksamkeit in der Öffentlichkeit, im Vergleich zum visuellen Augmented Reality, ein sehr großer Nachholbedarf besteht. Es gibt mittlerweile auch schon zahlreiche Anwendungsbereiche, in welchen der Nutzen des auditiven AR präsentiert werden konnte. Diese erstrecken sich sowohl über Bereiche, in welchen sich bereits viele Anwendung des visuellen AR vorfinden, wie z.B. der Bildung, Steigerung der Produktivität oder zu reinen Vergnügungszwecken als auch in Spezialbereichen wie der Medizin. So gab es bereits vor zehn Jahren Unternehmungen, mithilfe auditiver AR eine Erweiterung des Hörsinnes für Menschen mit Sehbehinderung zu kreieren. Dabei konnte durch Sonifikation von realen Objekten eine rein auditive Orientierungshilfe geschaffen werden.
Methodik
In diesem Projekt sollen Teilnehmer*innen sich frei in einem Raum, in welchem Gegenstände positioniert sind, bewegen können und obwohl diese in der Realität keine Klänge erzeugen, sollen die Teilnehmer*innen Klänge über Kopfhörer wahrnehmen können. In diesem Sinne also eine Erweiterung der Realität („augmented reality“), da mithilfe technischer Mittel Informationen in auditiver Form der Wirklichkeit hinzugefügt werden. Im Wesentlichen erstrecken sich die Bereiche für die Umsetzung zum einen auf die Positionsbestimmung der Person (Motion-Capture) und die Binauralisierung und zum anderen im künstlerischen Sinne auf die Gestaltung der Klang-Szene durch Positionierung und Synthese der Klänge.
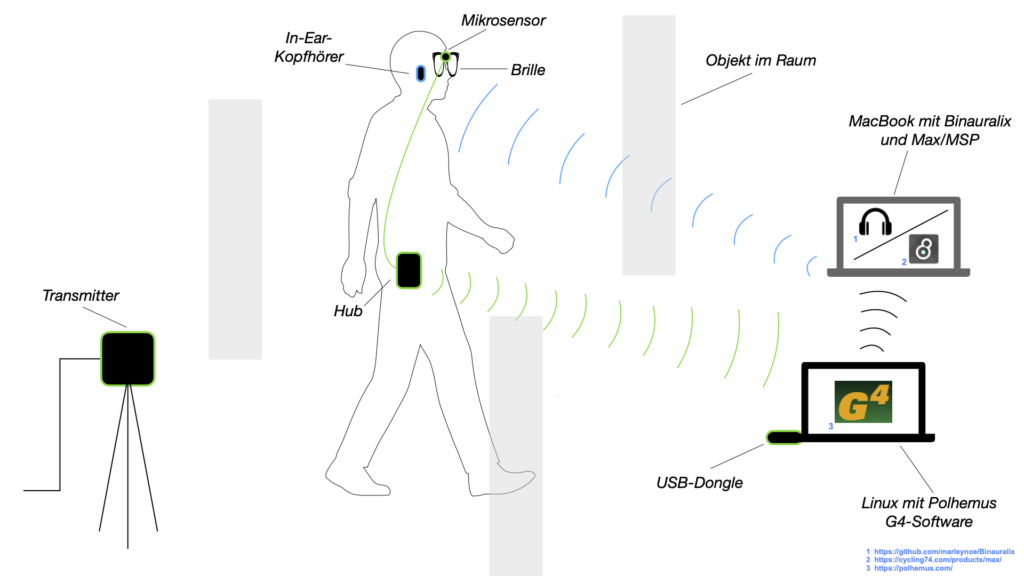
Abbildung 1
Das Motion-Capture wird in diesem Projekt mit dem Polhemus G4 System realisiert. Die Richtung- und Positionsbestimmung eines Micro-Sensors, welcher an einer vom Teilnehmer getragenen Brille befestigt wird, geschieht durch ein Magnetfeld, welches von zwei Transmittern erzeugt wird. Ein Hub, der über ein Kabel mit dem Micro-Sensor verbunden ist, sendet die Daten des Motion-Captures an einen USB-Dongle, der an einem Laptop angeschlossen ist. Diese Daten werden an einen weiteren Laptop gesendet, auf welchem zum einen die Binauralisierung geschieht und der zum anderen letztendlich mit den kabellosen Kopfhörern verbunden ist.
In Abbildung 2 kann man zwei der sechs Objekte in je einer Variante (Winkel von 45° und 90°) betrachten. In der nächsten Abbildung (Abb. 3) ist die Überbrille (Schutzbrille die auch über einer Brille getragen werden kann) zu sehen, welche in der Klanginstallation zum Einsatz kommt. Diese Brille verfügt über einen breiten Nasensteg, auf welchem der Micro-Sensor mit einem Micro-Mount von Polhemus befestigt ist.
Abbildung 2
Abbildung 3
Wie schon zuvor erläutert, müssen für den Aufbau der Klanginstallation auch diverse Entscheidung vor einem künstlerischen Aspekt getroffen werden. Dabei geht es um die Positionierung der Gegenstände / Klangquellen und die Klänge selbst.
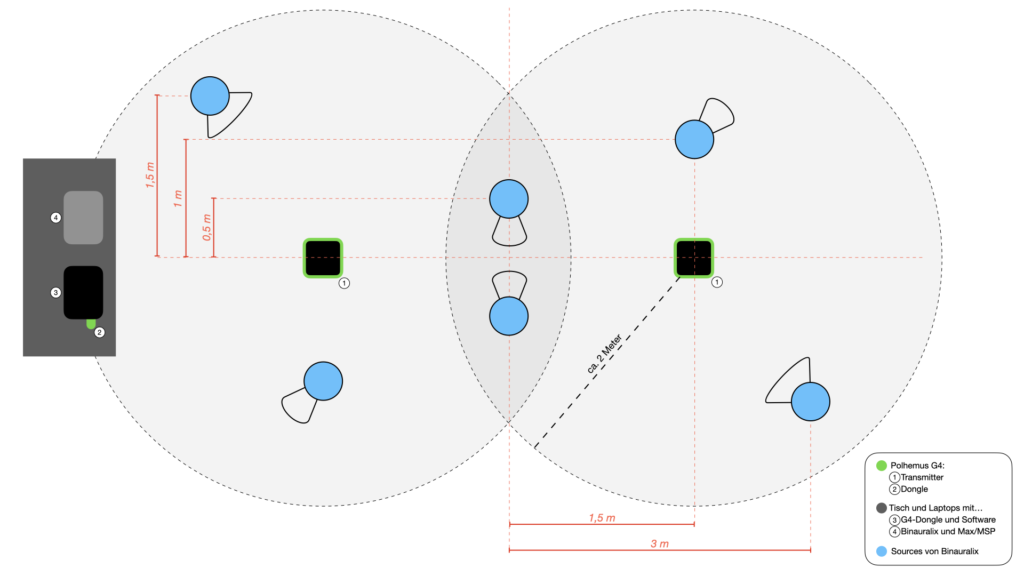
Abbildung 4
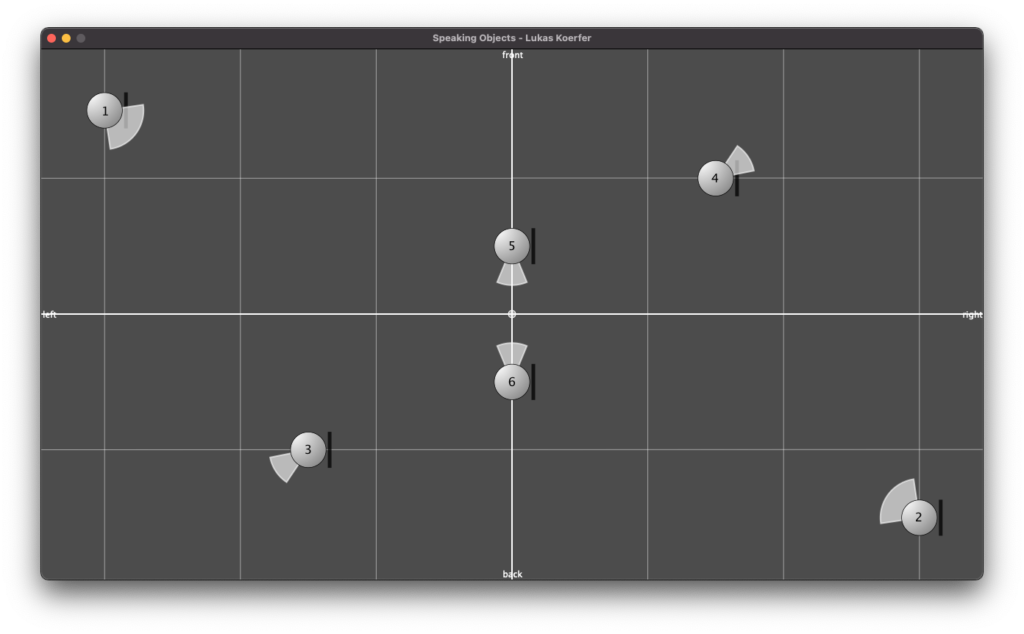
Abbildung 5
Die Abbildung 4 zeigt eine skizzierte Draufsicht des kompletten Aufbaus. Die sechs blau gefärbten Kreise markieren die Positionen der Gegenstände im Raum und natürlich gleichzeitig die der Klangquellen der Szene in Binauralix, welche in Abbildung 5 zu erkennen ist. Den farblosen Bereichen (in Abb. 4), im entweder 45° oder 90° Winkel, um die Klangquellen, können Richtung und Winkel der Quellen entnommen werden.
Die komplett kabellose Positionserfassung und Datenübertragung, ermöglicht den Teilnehmer*innen das uneingeschränkte Eintauchen in dieses Erlebnis der interaktiven realitätserweiternden Klangwelt. Die Klangsynthese wurde mithilfe der Software SuperCollider vorgenommen. Die Klänge entstanden hauptsächlich durch diverse Klopf- und Klickgeräusche, welche durch das SoundIn-Objekt aufgenommen wurden, und schließlich Veränderungen und Verfremdungen der Klänge durch Amplituden- und Frequenzmodulation und diverse Filter. Durch Audio-Routing der Klänge auf insgesamt 6 Ausgangskanäle und „s.record(numChannels:6)“ konnte ich in SuperCollider eine zweiminütige Mehrkanal Audio-Datei erstellen. Beim Abspielen der Datei in Binauralix wird automatisch der erste Kanal auf die Source eins, der zweite Kanal auf die Source 2 usw. gemappt.
Technische Umsetzung
Die technische Herausforderung für die Umsetzung des Projekts bestand zuerst grundlegen aus dem Empfangen und dem Umformatieren der Daten des Sensors, sodass diese in Binauralix verwertet werden können. Dabei bestand zunächst das Problem, dass Binauralix nur für MacOS und die Software für das Polhemus G4 System nur für Windows und Linux verfügbar sind. Da mir zu diesem Zeitpunkt neben einem MacBook auch ein Laptop mit Ubuntu Linux als Betriebssystem zur Verfügung stand, installierte ich die Polhemus Software für Linux.
Nach dem Bauen und Installieren der Polhemus G4 Software auf Linux, standen einem die fünf Anwendungen „G4DevCfg“, „CreateSrcCfg“, „g4term“, „g4display“ und „g4export“ zur Verfügung. Für mein Projekt muss zuerst mit „G4DevCfg“ alle verwendeten Devices miteinander verbunden und konfiguriert werden. Mit der Terminal-Anwendung „g4export“ kann man durch Angabe der zuvor erstellten Source-Configuration-File, der lokalen IP-Adresse des Empfänger-Gerätes und einem Port die Daten des Sensors über UDP übermitteln. Die Source-Configuration-File ist eine Datei, in welcher zum einen Position und Orientierung der Transmitter durch einen „Virtual Frame of Reference“ festgelegt werden und zum anderen Einstellungen zu Eintritts-Hemisphäre in das Magnetfeld, Floor Compansation und Source-Calibration-File vorgenommen werden können. Zum Ausführen der Anwendung müssen zu diesem Zeitpunkt die Transmitter und der Hub angeschaltet, der USB-Dongle am Laptop und der Sensor am Hub angeschlossen und der Hub mit dem USB-Dongle verbunden sein. Wenn sich nun das MacBook im selben Netzwerk wie der Linux-Laptop befindet, kann mit der Angabe des zuvor genutzten Ports die Daten empfangen werden. Dies geschieht bei meiner Klanginstallation in einem selbst erstellen MaxMSP-Patch.
Abbildung 6
In dieser Anwendung muss zuerst auf der linken Seite der passende Port gewählt werden. Sobald die Verbindung steht und die Nachrichten ankommen, kann man diese unter dem Auswahlfeld in der raw-Form betrachten. Die sechs Werte, die oben im mittleren Bereich der Anwendung zu sehen sind, sind die aus der rohen Nachricht herausgetrennten Werte für die Position und Orientierung. In dem Aktionsfeld darunter können nun finale Einstellung für die richtige Kalibrierung vorgenommen werden. Darüber hinaus gibt es auch noch die Möglichkeit die Achsen individuell zu spiegeln oder den Yaw-Wert zu verändern, falls unerwartete Probleme bei der Inbetriebnahme der Klanginstallation aufkommen sollten. Nachdem die Werte in Nachrichten formatiert wurden, die von Binauralix verwendet werden können (zu sehen rechts unten in der Anwendung), werden diese an Binauralix gesendet.
Das folgenden Videos bieten einen Blick auf die Szene in Binauralix und einen Höreindruck, während sich der Listener — gesteuert von den Sensor-Daten — durch die Szene bewegt.
Vergangene Vorstellungen der Klanginstallation
Die Klanginstallation als Beitrag im Rahmen der EFFEKTE-Vortragsreihe des Wissenschaftsbüro-Karlsruhe
Die Klanginstallation als Gegenstand eines Workshops für die Kulturakademie an der HfM-Karlsruhe